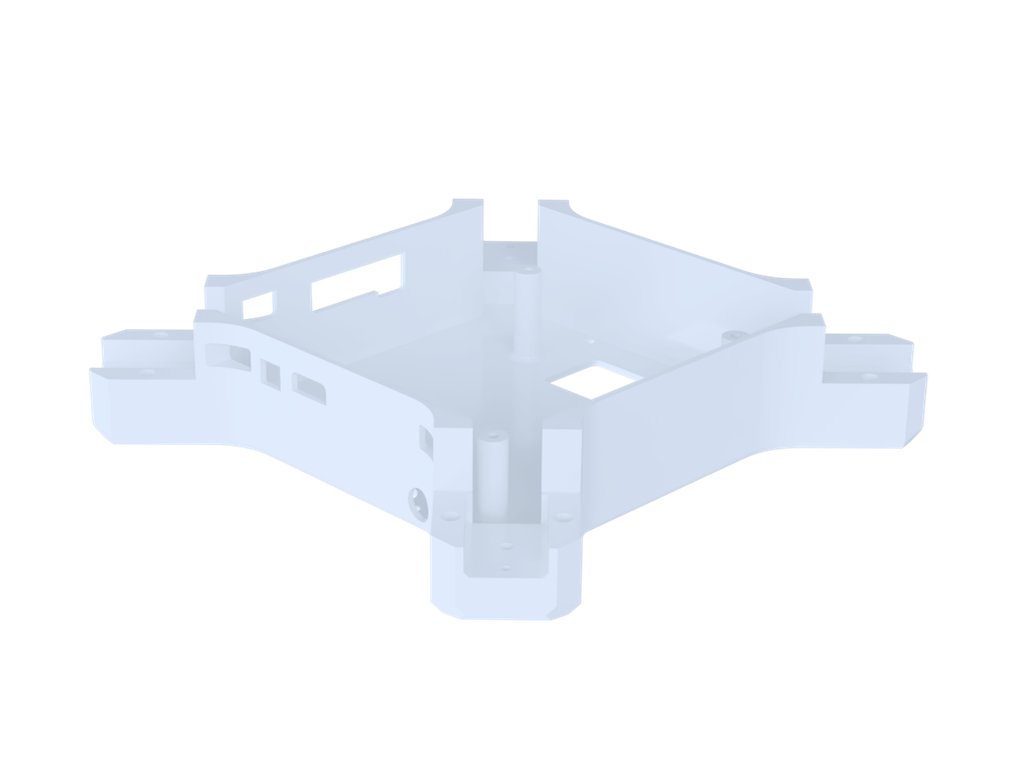
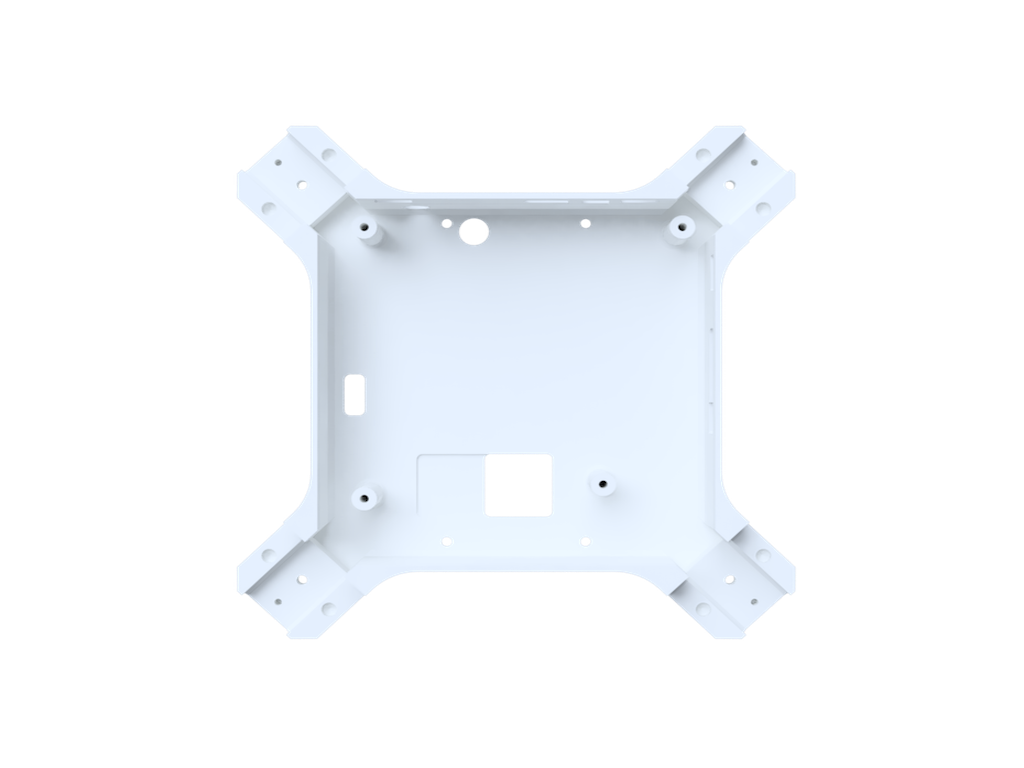
The Model-X is a light-weight quadcopter frame designed with 3D printing in mind. Fully assembled, Model-X weighs 950 g without the battery, which translates to 15-20 minutes of flight time.
Features:
The Model-X frame was designed with Autocads's Fusion 360 and the latest CAD development files can be found in our GIT repository: sigmadrone-cad.git . The Production STL files can be downloaded bellow.
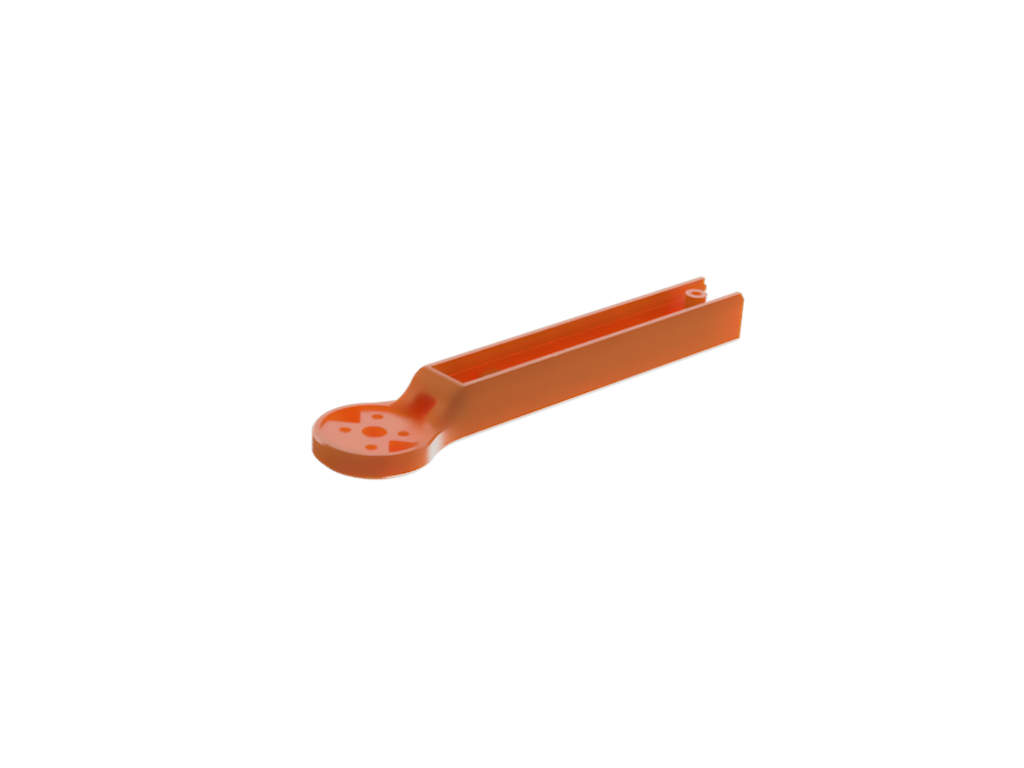
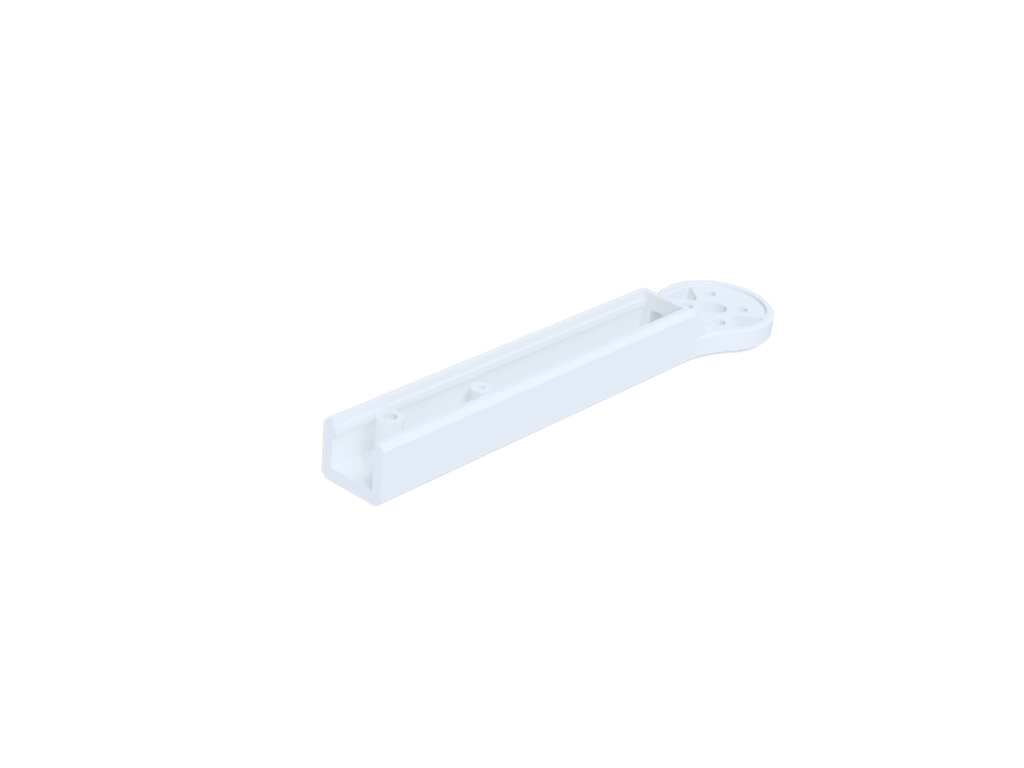
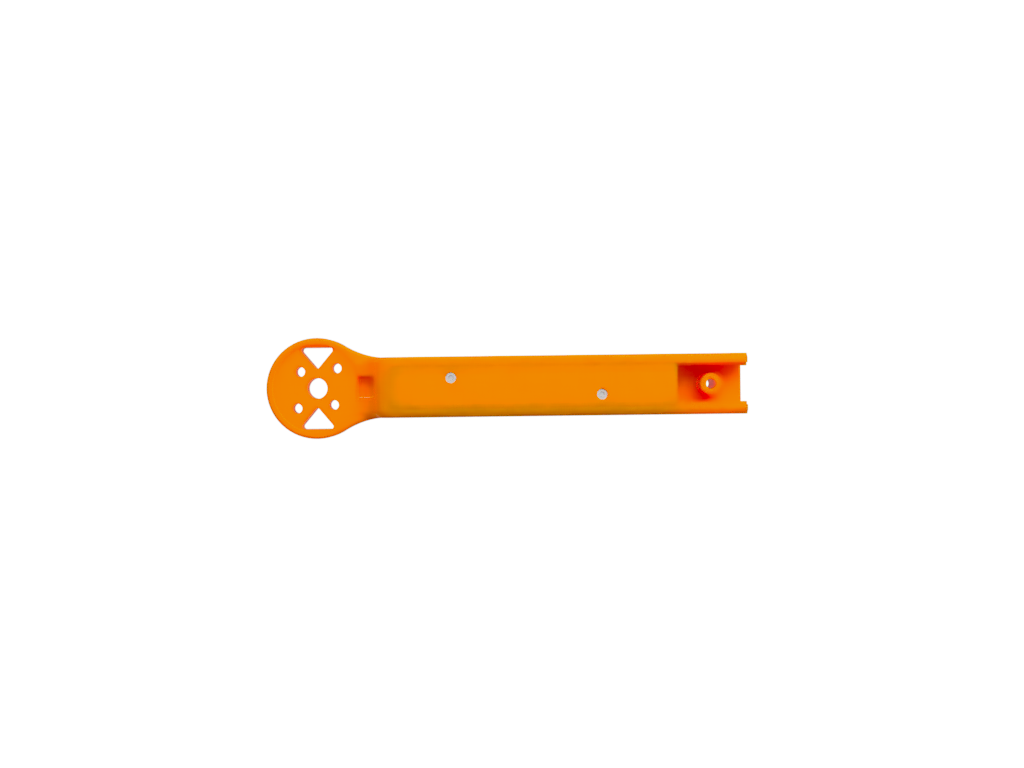
Mount each arm to the X-Base using M3x8 mm socket head bolts. It is recommended to print the arms in pairs of 2 different colors, thus making it easier to distinguish the front from the back of the aircraft.
Mount each motor using four M3x8 mm socket head bolts. Thread the motor cables through the arm.
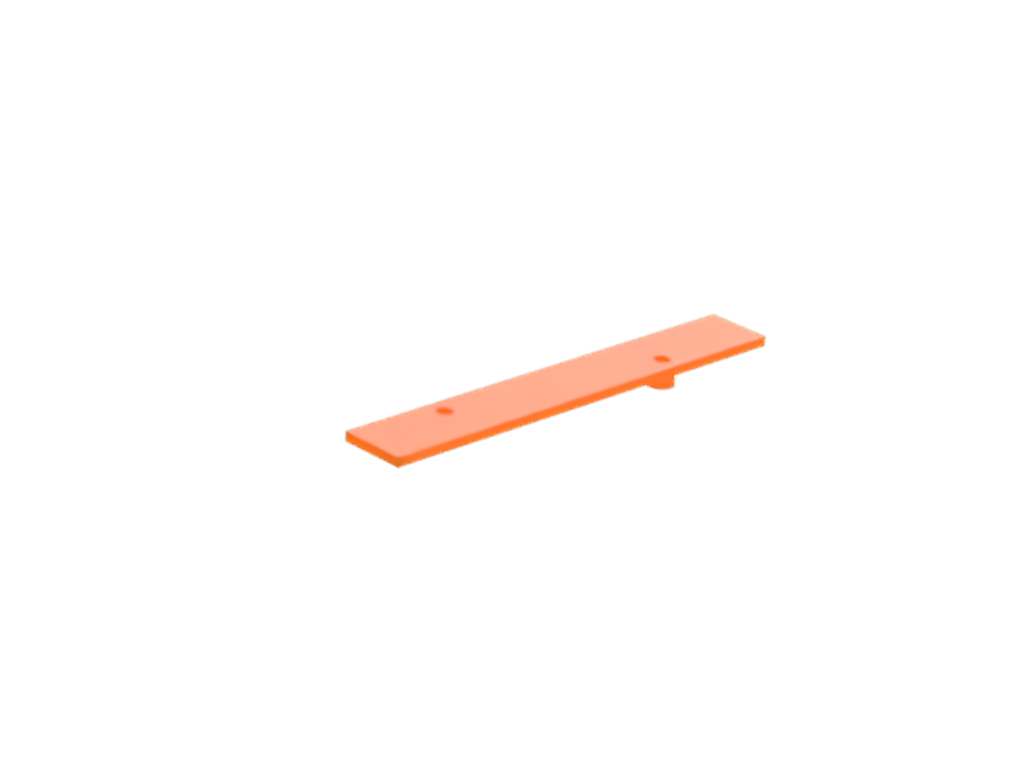
Mount the arm cover using two M2x8 mm head screw bolts.
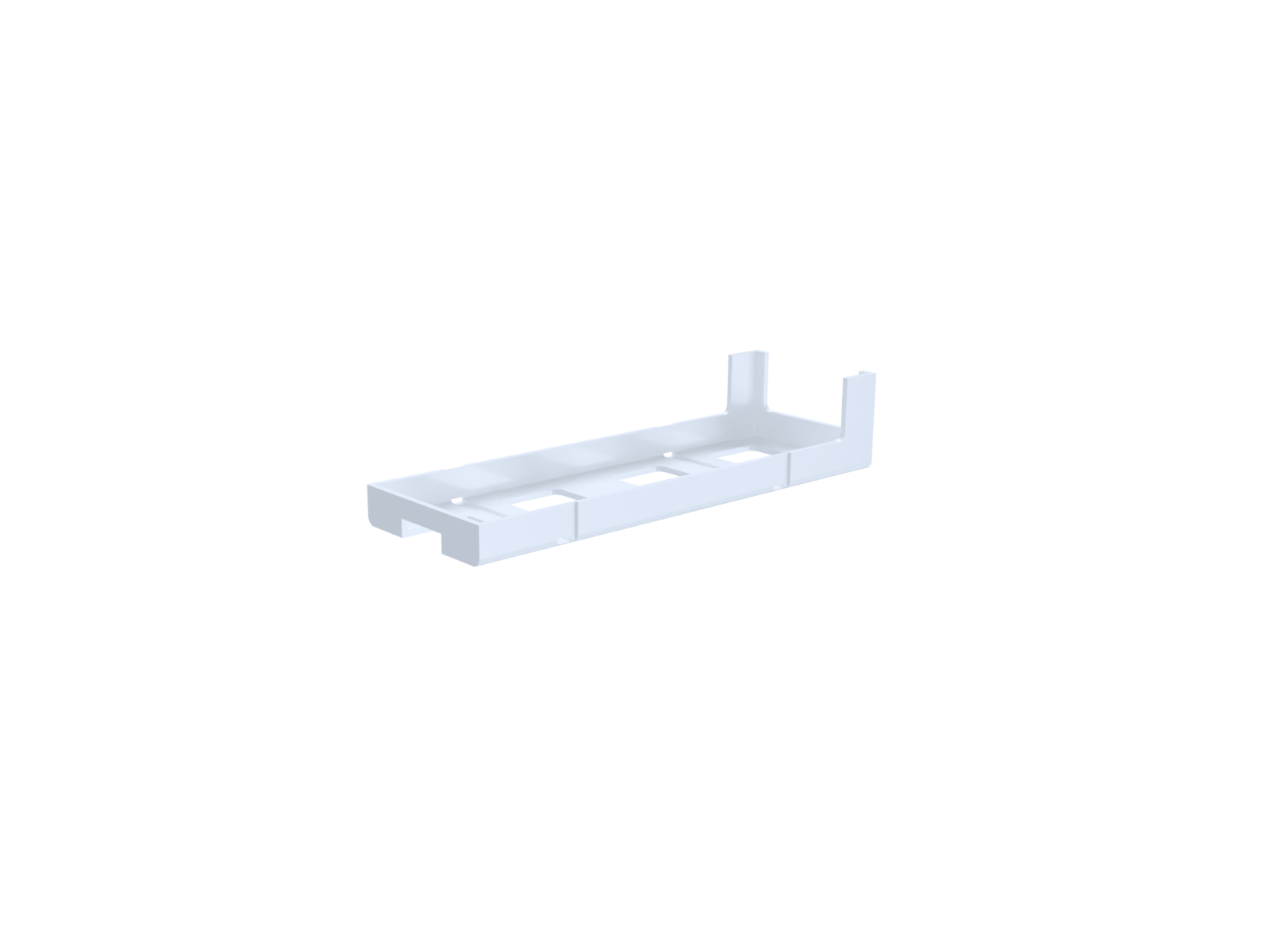
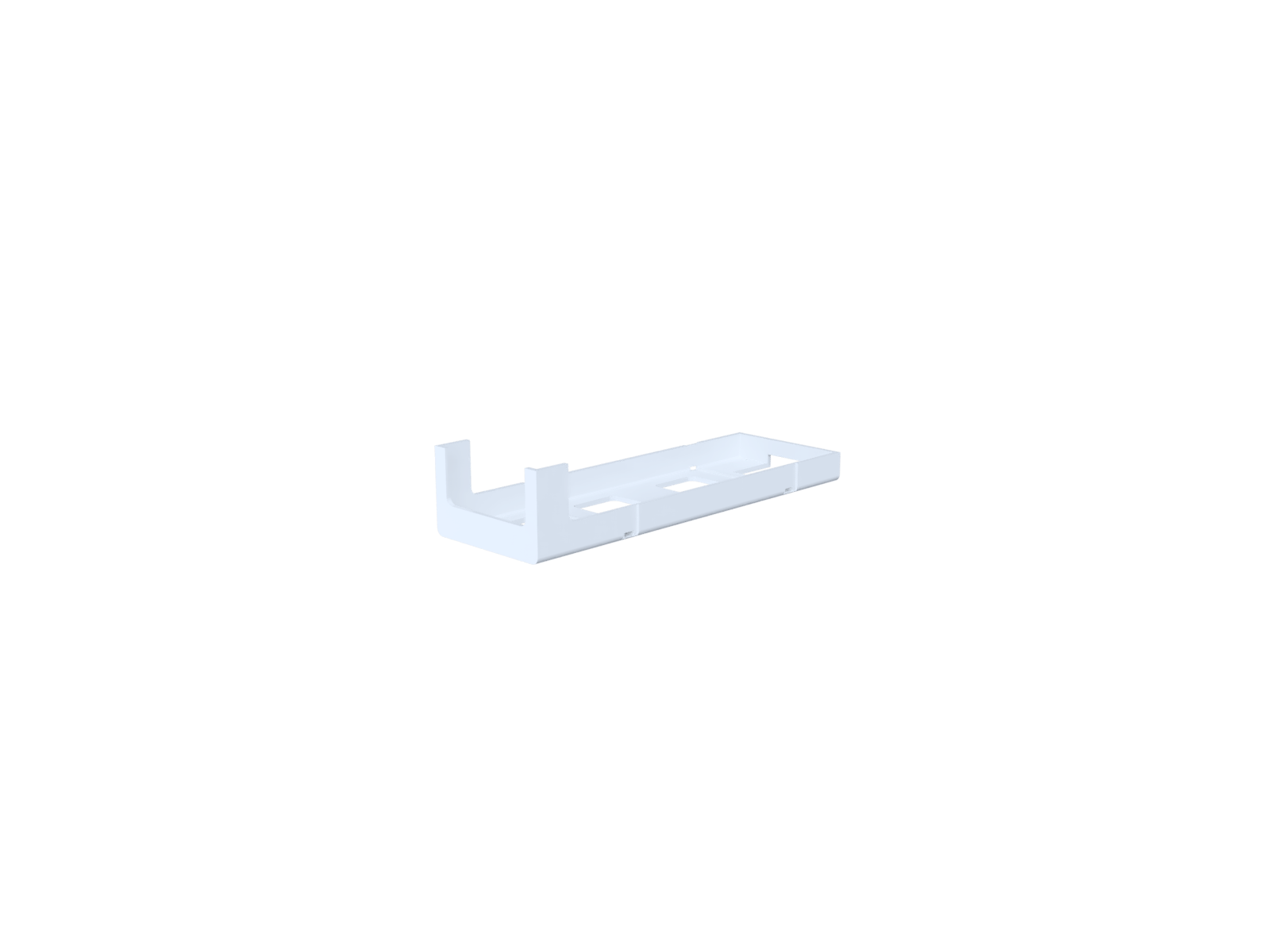
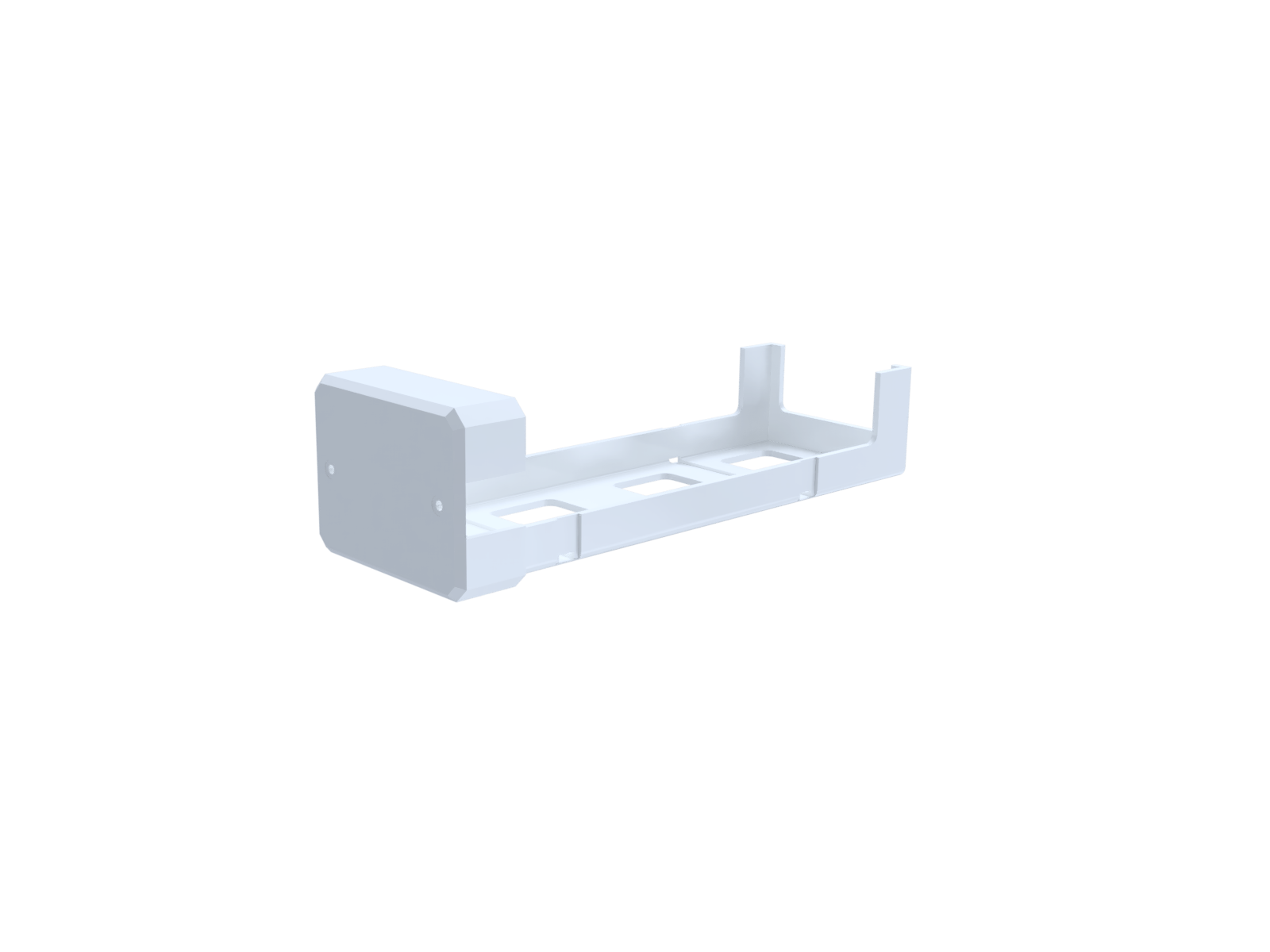
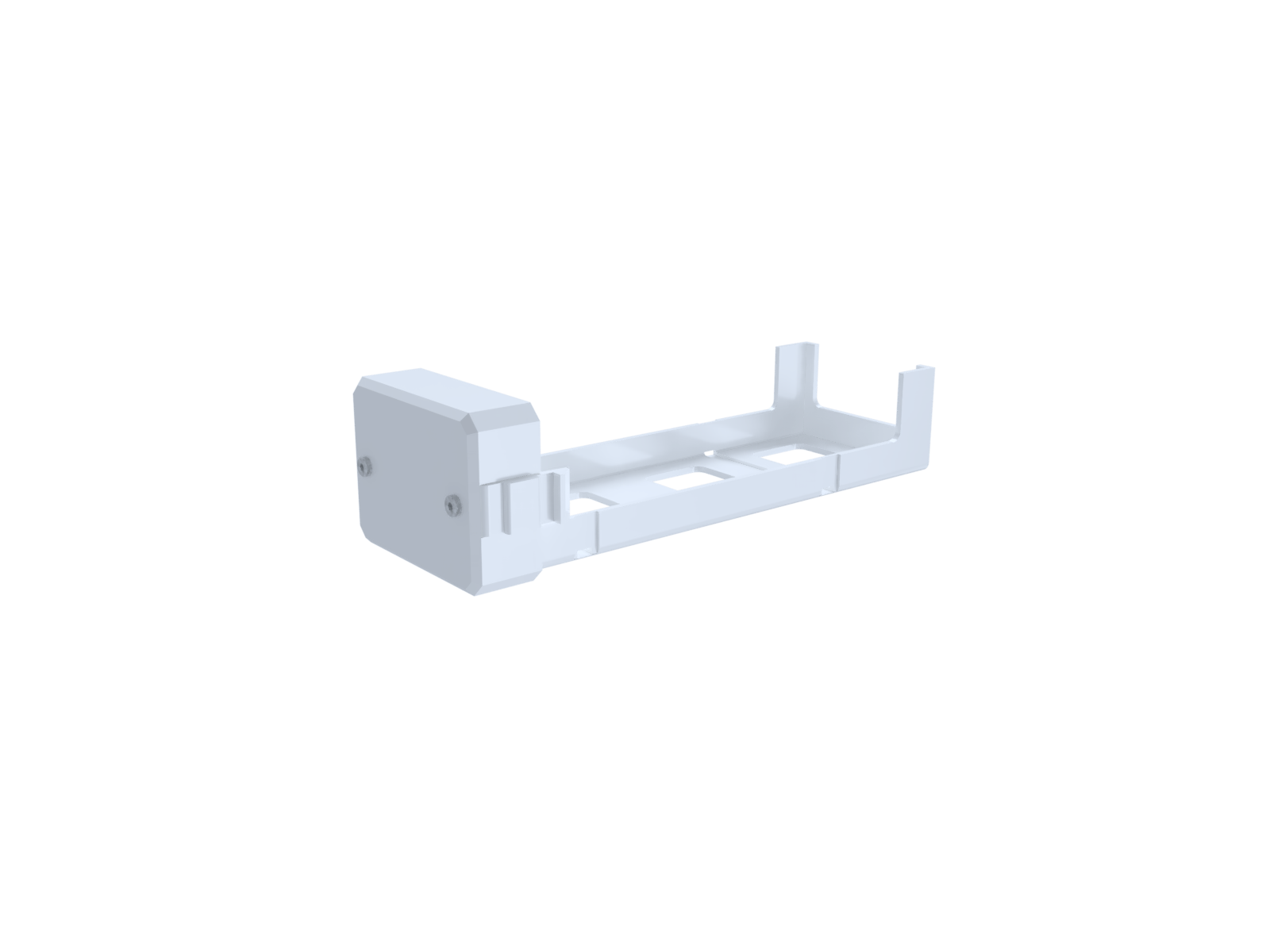
Mount the battery compartment to the X-Base using four M3x8 mm socket head bolts.
Mount the ESC pack to the X-Base using 3M double sided tape. Recommended ESCs are:
Mount the RC receiver to the X-Base using 3M double sided tape.
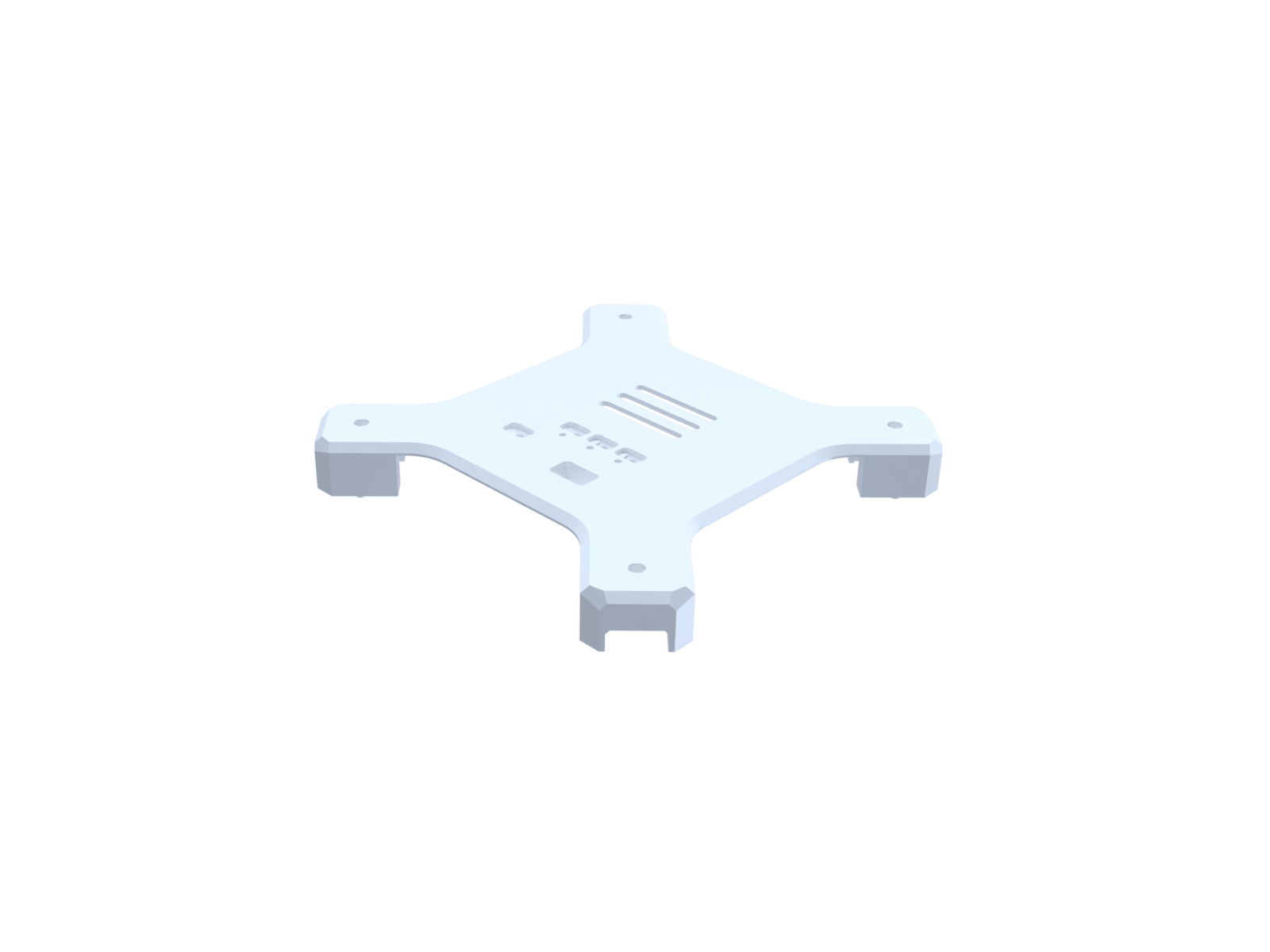
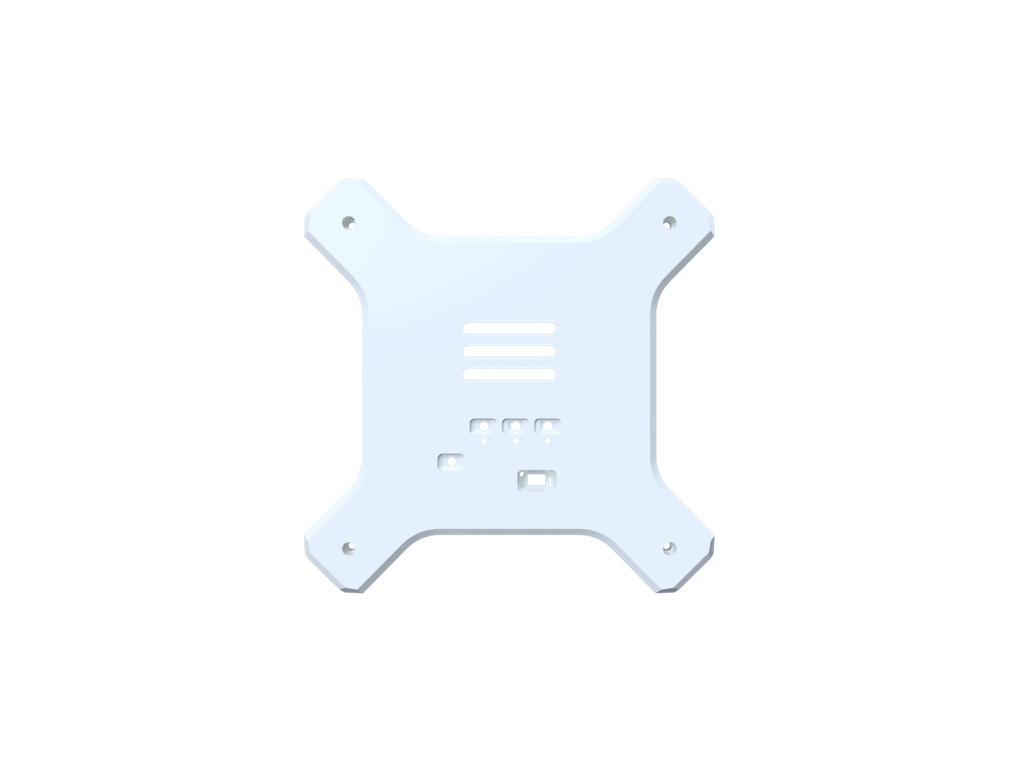
Attach the top cover to the X-Base using four M3x30 mm socket head bolts and four self-tightening nuts.
Mount the battery cover to the sliding battery bed using two M3x6 mm socket head bolts
Mount the snap joint to the battery cover using two M3x6 mm socket head bolts
Attach each leg to the main body using four M3x8 mm socket head bolts
© 2017 Sigmadrone